IZENA Piezak berreraikitzeko 3D ikusmen-sistema, akatsak detektatzeko erabilgarria, bai eta robot malguen bidez piezak lokalizatzeko eta grasping-a egiteko
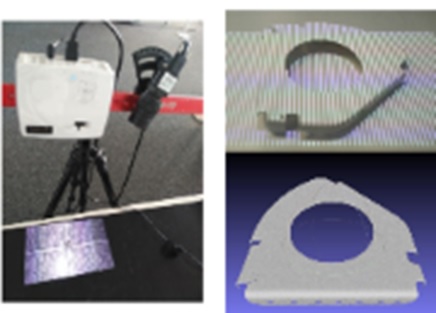
Hardwarearen eta softwarearen batura da sistema. Hardwareari dagokionez, 3D ikusmeneko zenbait sistema industrialek osatzen dute. Aplikazioaren eskakizunetara egokitzeko lagungarri diren zenbait ezaugarri dauzkate sistemek: atzitze-abiadura, doitasuna, estali beharreko eremuaren tamaina, eramangarritasuna eta abar. Akatsak detektatzeko, pieza ezagunen errore geometrikoen detekzioa egin dezake softwareak. Ingurunetik puntu-hodei bat atzitzeko ahalmena duen 3D ikusmeneko sistema bat erabiltzen da horretarako. Piezak handiak badira, piezaren zenbait bista egin eta batu egin daitezke irudi orokor bat sortzeko, doitasun-mailari eutsiz. Puntu-hodeia lortu ondoren, piezaren eredu teorikoarekin, erreferentzia-eredu batekin, CAD batekin... lerrokatu behar da. Lerrokatu ondoren, elkarrekin alderatu behar dira ereduaren puntuak eta eszenarenak. Koloretako mapa bat sortzen da, haien arteko desberdintasunak bistaratzen dituena, eta erroreak detektatzeko prozesu bat garatzen da. Hala, atzipenetik piezaren akats geometrikoen detekzioraino automatizatzen da prozesua. Robot malguen bidez piezak lokalizatu eta graspinga egiteko aplikazioen kasuan, softwarea diseinatuta dago ingurunearen egoera atzitzeko eta robotari koordenatuak bidaltzeko, pieza jakin bat har dezan. 3D ikusmeneko sistema bat, robot bat eta atzapar-sistema bat ditu. Sistemak bere burua kalibratzen du; ikusmen-sistemaren eta robotaren arteko kalibrazio-prozesu bat dago. Ikusmenaren alderdiak pieza ezagun bat lokalizatzen du ikusmen-eremuan robotaren posizioa zuzentzeko, pieza bakoitza modu efizientean hartzeko gai izan dadin. Atzapar-sistemak, berriz, oratze-posizioa optimizatzen du, atzaparraren eta piezaren orientazioa aintzat hartuta. Piezen CAD ereduak erreferentzia gisa erabiltzen dira; robotak lokalizazio-eskari bat egiten du, eta ikusmen-sistemak piezaren posizioa itzultzen du, robotaren erreferentziatan.
Aplikazio-eremuak
Aplikazio robotizatuetarako malgutasuna
Robot bidezko kalitate kontrola
Robot bidezko manipulazio aurreratua
Robot bidezko osagai-fabrikazioa eta -mihiztatzea
EKIPO ETA OSAGAI GARRANTZITSUENAK
-
Argi egituratuko ikusmen-sistema
-
ENSENSO ikusmen-sistema estereoa
-
HALCON ikusmen-softwarea
-
Ikusmen-liburutegi propioak: kalibrazioa, erregistroa, parekatzea, akats-detekzioa, pieza-detekzioa
-
uEye kamera eta testura-proiektagailua dituen custom sistema estereoa
AKTIBOAK ESKAINTZEN DITUEN ZERBITZUAK
Aplikazio robotizatuetarako malgutasuna
Ikusmenean oinarritutako parte-detekzio eta -lokalizazioa robota gidatzeko
Nodoko agenteak eskaintzen dituen zerbitzu orokorrak
1. Aholkularitza teknologikoa eta ekonomikoa 2. Diseinua, prototipatzea eta baliozkotzea 3. Trebakuntza eta sentsibilizazioa
Robot bidezko kalitate-kontrola.
Piezen tamainaren kontrola, robotak eta 3D ikusmena baliatuz. Piezen osotasunaren eta akatsen kontrola, robotak eta 3D ikusmena baliatuz.
Robot bidezko manipulazio aurreratua
Bin Picking edo Kitting motako pick&place manipulazioa
Robot bidezko osagai-fabrikazioa eta -mihiztatzea
Robot bidezko osagai-muntaketa Robot bidezko fabrikazio aditiboa Robot bidezko torlojutzea
AKTIBOA KUDEATZEN DUEN ERAKUNDEA
Harremanetarako pertsona:
Karmele Florentino
karmele.florentino@tecnalia.com