Sistema de visión 3D para reconstrucción de piezas válido para aplicaciones de detección de defectos y para localización y grasping de piezas con robots flexibles
DESCRIPCIÓN
El sistema está compuesto por la suma de hardware y software.
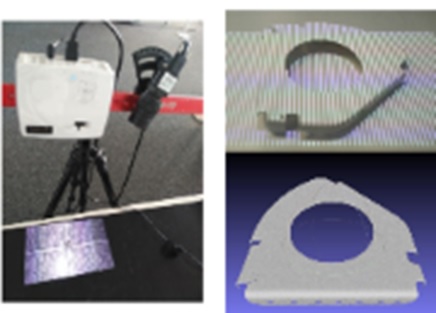
En el apartado de hardware, está compuesto por diversos sistemas industriales de visión 3D. Los distintos sistemas aportan distintas características desde el punto de vista de velocidad de captura, precisión, tamaño del área a cubrir, portabilidad, etc, que permiten adaptarse a los requerimientos de la aplicación.
Para detección de defectos, el software es capaz de hacer una detección de errores geométricos de piezas conocidas. Se utiliza un sistema de visión 3D capaz de capturar una nube de puntos del entorno. En casos de piezas grandes, se pueden realizar distintas vistas de la pieza y unirlas para generar una representación global manteniendo el nivel de precisión. Una vez se obtiene la nube de puntos se hace un alineamiento con el modelo teórico de la pieza, un modelo de referencia, un CAD,etc. Una vez alineados se comparan las distancias entre los puntos del modelo y los puntos de la escena. Se crea un mapa de colores con las diferencias entre ellos y se desarrolla un procesamiento de detección de errores. De esta manera automatizamos el proceso desde la captura a la detección de errores geométricos de la pieza.
Para aplicaciones de para localización y grasping de piezas con robots flexibles, el software está diseñado para capturar la situación del entorno y enviar al robot las coordenadas necesarias para coger una pieza determinada. Se compone de un sistema de visión 3D, un robot y un sistema de garras. El sistema se calibra entre sí, hay un proceso de calibración entre el sistema de visión y el robot. La parte de la visión se encarga de localizar una pieza conocida dentro del área de visión para corregir la posición del robot y que sea capaz de coger de forma eficiente cada pieza. El sistema de garras se encarga de optimizar la posición de agarre dependiendo de la orientación de la garra y de la pieza. Se utiliza como referencia los modelos CADs de las piezas, el robot hace una petición de localización y el sistema de visión devuelve la posición de la pieza en referencias del robot.
EQUIPOS Y COMPONENTES MÁS DESTACADOS
Librerías propias de visión: calibración, registro, emparejamiento, detección de defectos, detección de piezasSERVICIOS OFRECIDOS POR EL ACTIVO

Control calidad con robots.
Fabricación y ensamblado de componentes por robots
Flexibilidad para aplicaciones robotizadas
Manipulación avanzada con robots
Servicios generales ofrecido por el agente del nodo
ENTIDAD QUE GESTIONA EL ACTIVO
FUNDACIÓN TECNALIA RESEARCH & INNOVATION
Persona de contacto: Karmele Florentino



Otros activos relacionados
Háblanos de tu necesidad
Deja que te conozcamos mejor. Si buscas implementar tecnologías inteligentes y materiales avanzados que mejoren la eficiencia del sistema productivo de tu empresa para ofrecer soluciones de más valor añadido, completa este formulario.