DENOMINACIÓN NEXTAGE-Open – Robot bibrazo de torso humanoide
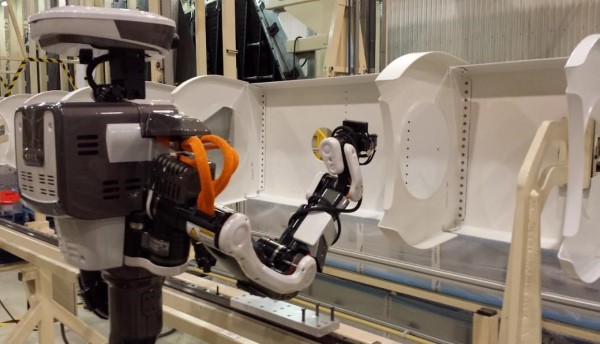
El robot NEXTAGE OPEN es un robot bibrazo del fabricante Kawada. Está enfocado a ser una plataforma de investigación gracias al entorno de programación software que incorpora que es altamente escalable. El sotfware del robot es ROS-compatible. Incorpora un software y controlador open source suministrado por TORK (Tokyo Opensource Robotics Kyokai Association). Dispone de una cámara en cada brazo que le permiten hacer detección de objetos con precisión y dos cámaras en la cabeza que combinadas con las de las muñecas le permite realizar detección de objetos con información visual desde varios ángulos. En cuanto a seguridad dispone de motores de baja potencia (<80W) y las articulaciones de los brazos están protegidas y no presentan elementos que puedan ocasionar pellizcos o atrapamientos. SOFTWARE - Fully open source (compliant with Standard Robotic cell project) - Access to the robot control (no PLC/interfaces necessity) - Advance programming using ROS (harmonized with SNZ Cobot) - Limited speed (<250 mm/s), acceleration and power (<80W) - Collision detection - Real time motion planner: trajectory calculated, no programmed HARDWARE - Compact and light-weigh unit (<50Kg) - Positioning repeatability accuracy (TCP): ± 0.03 mm - Position accuracy using vision: 0.5 mm - Max. linear velocity: 700mm/s - Power supply: 220v - Power consumption: 1200-1500 W - 15 DOF (Arms 6x2, Neck 2, Waist 1) - Length of arm: 57 cm - Payload: 1,5 Kg per hand, 3.0kg /both arms - Artificial vision system in head and hands
ÁMBITOS DE APLICACIÓN
Control calidad con robots
Fabricación y ensamblado de componentes por robots
Flexibilidad para aplicaciones robotizadas
Manipulación avanzada con robots
EQUIPOS Y COMPONENTES MÁS DESTACADOS
-
2x Stereovision por USB3 cámara a color
2x Stereovision por USB3 cámara a color
-
Cabeza Kawada
- 2 dof Pan Tilt
- 1x cámara Stereovision por USB2 -
Pedestal de robot
-QNX PC de bajo nivel
-Aplicación de control de PC: Linux Ubuntu + ROS -
Pinzas
Pinza eléctrica (serie com + potencia)
Pinza neumática
2 Desbarbadores de efectores finales mediante neumática.
Cambiador neumático de herramientas Schunk -
Torso Kawada
- 2x 6dof brazos con electrónica incorporada (controladores - CAN com)
- 1x rotación del torso
SERVICIOS OFRECIDOS POR EL ACTIVO
Control calidad con robots
Control dimensional de piezas con robots y vision 3D Control de integridad y defectos de piezas con robots y vision 3D
Fabricación y ensamblado de componentes por robots
Accuracy improvement of robots Remachado con robots Montaje de componentes con robots Atornillado con robot Rebarbado con robots
Flexibilidad para aplicaciones robotizadas
Generación automática de trayectorias sin colisión Programación automática o fácil de células robotizadas Detección y localización de piezas basada en Vision para guiado de robot. Dual-arm coordinated motion Teleoperation of robots
Manipulación avanzada con robots
Manipulación pick en place tipo Bin Picking o Kitting
Servicios generales ofrecido por el agente del nodo
1. Asesoramiento tecnológico-económico 2. Diseño, prototipado y validación 3. Formación y Sensibilización
ENTIDAD QUE GESTIONA EL ACTIVO
Persona de contacto:
Karmele Florentino
karmele.florentino@tecnalia.com