DENOMINACIÓN Célula robótica de inspección/medida de componentes mediante técnicas no destructivas
La célula permite realizar análisis para control de calidad e inspección no destructiva de piezas. El sistema se puede configurar para realizar operaciones de inspección y medida utilizando diversas tecnologías que incluyen cámaras de visión, termografía, multiespectral y diferentes tipos de algoritmos de procesamiento de las imágenes obtenidas. El sistema está formado por sistemas de visión 2D o 3D, photogrametic stereo, equipos de inspección no destructiva (multiespectral, termografía), e infraestructura para simular diferentes configuraciones y condiciones de trabajo en la pieza. Los sistemas de inspección son configurables para su uso en varias funciones. La célula permite realizar distintos estudios sobre pieza: • Control dimensional 2D/3D mediante técnicas de visión 2D y 3D; • Detección e identificación de defectos superficiales. Esta célula ofrece la posibilidad de evaluar la viabilidad de realizar inspecciones tanto in-line como off-line, analizando requisitos ligados a resolución, tiempos de ciclo, etc. y automatizar soluciones tanto para control de calidad como para manipulación de pieza.
ÁMBITOS DE APLICACIÓN
Control calidad con robots
Flexibilidad para aplicaciones robotizadas
EQUIPOS Y COMPONENTES MÁS DESTACADOS
-
Armario para establecer condiciones controladas de iluminación, Cinta de transporte controlada con encoder
-
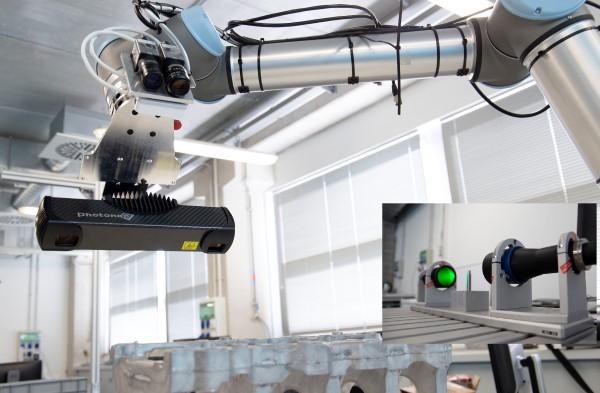
Brazo robótico manipulador
-
Sistema de visión 2D/3D configurable
Sistema de visión 2D/3D configurable. Cámara Gocator, Ranger Sick, Equipo photometric stereo IAI, Equipo Multiespectral Pulnix, Cámara termográfica
-
Software para control dimensional y detección de defectos
-
Software para inspección inline y control 100%
SERVICIOS OFRECIDOS POR EL ACTIVO
Análisis de viabilidad técnica
Estudio de viabilidad de las limitaciones asociadas a la detección de defectos especificados por el cliente.
Demostración/Acercamiento
Demostrador de célula robotizada para la inspección/medida de componentes.
Formación
Entrenamiento práctico en la aplicación de robótica para la inspección / medición de componentes
Prueba de concepto
Pruebas rápidas de posibles configuraciones y ciclos de trabajo para valorar la concepción de la solución final de inspección y medida.
ENTIDAD QUE GESTIONA EL ACTIVO

Persona de contacto:
Ander Ansuategi
ander.ansuategi@tekniker.es