NAME NEXTAGE-Open – Dual arm robot with humanoid torso
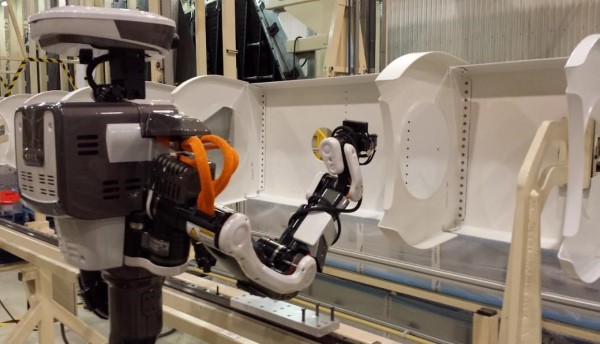
The NEXTAGE OPEN robot is a dualarm robot from the manufacturer Kawada. It is focused on being a research platform thanks to the software programming environment that it incorporates that is highly scalable. The software of the robot is ROS-compatible. It incorporates an open source software and driver provided by TORK (Tokyo Opensource Robotics Kyokai Association). It has a camera on each arm that allows you to detect objects accurately and two cameras in the head that combined with the other two allow you to perform object detection with visual information from various angles. In terms of safety, it has low power motors (<80W) and the arm joints are protected and do not have elements that could cause pinching. SOFTWARE - Fully open source (compliant with Standard Robotic cell project) - Access to the robot control (no PLC/interfaces necessity) - Advance programming using ROS (harmonized with SNZ Cobot) - Limited speed (<250 mm/s), acceleration and power (<80W) - Collision detection - Real time motion planner: trajectory calculated, no programmed HARDWARE - Compact and light-weigh unit (<50Kg) - Positioning repeatability accuracy (TCP): ± 0.03 mm - Position accuracy using vision: 0.5 mm - Max. linear velocity: 700mm/s - Power supply: 220v - Power consumption: 1200-1500 W - 15 DOF (Arms 6x2, Neck 2, Waist 1) - Length of arm: 57 cm - Payload: 1,5 Kg per hand, 3.0kg /both arms - Artificial vision system in head and hands
FIELDS OF APPLICATION
Advanced manipulation with robots
Flexibility for robotic applications
Manufacture and assembly of components by robots
Quality control with robots
MOST OUTSTANDING EQUIPMENT AND COMPONENTS
-
2x Stereovision by USB3 Color camera
2x Stereovision by USB3 Color camera
-
Grippers
Electric gripper (serial com + power)
Pneumatic gripper
2 Deburring end-effectors using pneumatics
Schunk pneumatic tool changer -
Head Kawada product
- 2 dof Pan Tilt
- 1x Stereovision by USB2 camera -
Robot Pedestal
-QNX low level PC
-Application control PC: Linux Ubuntu +ROS -
Torso Kawada product
- 2x 6dof arms with embedded Electronics (drivers – CAN com)
- 1x Torso rotation
SERVICES OFFERED BY THE ASSET
Advanced manipulation with robots
Handling pick in place, in Picking or Kitting type
Flexibility for robotic applications
Automatic generation of trajectories without collision Automatic or easy programming of robotic cells Detection and location of parts based on Vision for robot guidance. Dual-arm coordinated motion Teleoperation of robots
General services offered by the node agent
1. Technological-economic advice 2. Design, prototyping and validation 3. Training and awareness
Manufacture and assembly of components by robots
Accuracy improvement of robots Riveting with robots Assembly of components with robots Screwed with a robot Deburring with robots
Quality control with robots
Parts dimensional control with robots and 3D vision parts integrity control and defects detection using robots and 3D vision
ENTITY MANAGING THE ASSET
Contact person:
Karmele Florentino
karmele.florentino@tecnalia.com