Inspection/measurement robotic cell using non-destructive techniques
DESCRIPTION
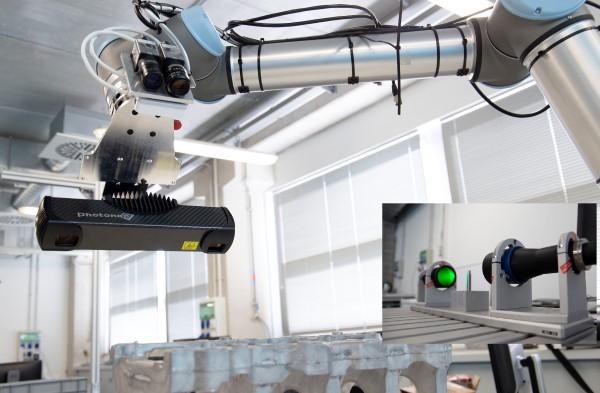
The cell allows the analysis for quality control and non-destructive inspection of parts. The system can be configured to perform inspection and measurement operations using various technologies including robotic arms, vision cameras, thermography, multispectral and different types of processing algorithms of the images obtained. The system consists of 2D or 3D vision systems, stereo photogrammetry, non-destructive inspection equipment (multispectral, thermography), and infrastructure to simulate different configurations and working conditions in the piece. The inspection systems are configurable for use in various functions. The cell allows to perform different studies on a piece:
• 2D / 3D dimensional control using 2D and 3D vision techniques;
• Detection and identification of surface defects.
This cell offers the possibility of evaluating the feasibility of carrying out inspections both in-line and off-line, analyzing requirements linked to resolution, cycle times, etc. and automate solutions for both quality control and piece handling.
MOST OUTSTANDING EQUIPMENT AND COMPONENTS
Configurable 2D / 3D vision systemGocator camera, Ranger Sick, IAI photometric stereo equipment, Pulsix Multispectral Equipment, Thermal camera
SERVICES OFFERED BY THE ASSET

Demonstration / Approaching technology
Proof of concept
Technical feasibility analysis
Training
ENTITY MANAGING THE ASSET

FUNDACIÓN TEKNIKER
Contact person: Ander Ansuategi



Other related assets
Tell us about your need
Let us get to know you better. If you are looking to implement intelligent technologies and advanced materials that improve the efficiency of your company's production system to offer solutions with more added value, fill in this form.